موتورسیکلت خریدم در 53
 در جایی در باخا کالیفرنیا ، مکزیک >
در جایی در باخا کالیفرنیا ، مکزیک > موتورسیکلت خریدم در 53
بحران میانسالی ... نه! زندگی تغییر می کند ... جهنم بله!
در اینجا همه چیز شروع شد. حدود 15 سال پیش تصمیم گرفتم یک اسکوتر بخرم. تابستان بود و بالاخره سن دیه گو بود. بنابراین من به Craigslist رفتم و 800 دلار برای چیزی که معلوم شد یک تکه پلاستیکی زباله چینی از چین است که برای چشم بی تربیت (مانند من) بسیار جالب به نظر می رسید ، اما با مشکلات زیادی سر و کار داشت ، انداختم. مکانیک به دلایلی از کار روی آن امتناع کرد ...
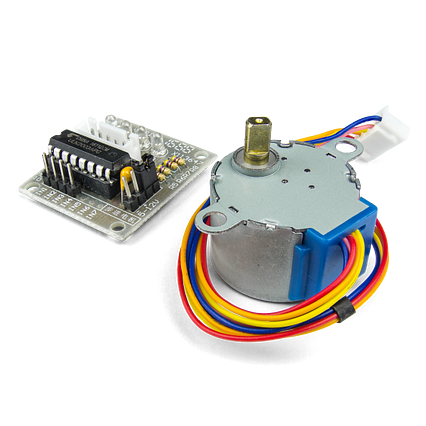
ULN2003 & 28BYJ-48 Stepper Motor
ULN2003 & 28BYJ-48 Stepper Motor
7-ch Darlington Sink Driver-.6A@50v peak-Ardu-Serie#61
سلام ، این برد دارای تراشه ULN2003 است که یک آرایه دارلینگتون است.
 ULN2003 و 28BYJ-48 موتور پله
ULN2003 و 28BYJ-48 موتور پله اساساً ULN2003APG توشیبا است.

که دارای هفت جفت مختلف دارلینگتون در داخل آن است:
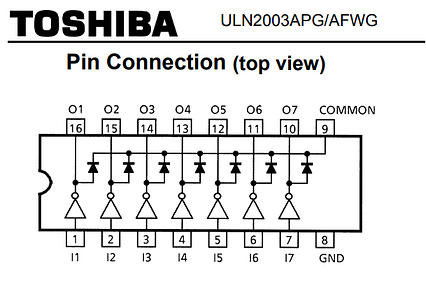
مدار جفت دارلینگتون در واقع فقط یک جفت ترانزیستور است که در آن ترانزیستور دوم برای تقویت جریان خروجی به ترانزیستور اول استفاده می شود.

مزیت این است که ما می توانیم از موتور پله ای خود با ولتاژ کم جریان خروجی جریان کم از میکروکنترلرهای دیجیتال i/یک جریان تقاضای بالاتر را هدایت کنیم. o پین در اینجا ما از یک برد آردوینو استفاده می کنیم (داخل آن ATMega328p uC :)
حالا خود برد:
حتی یک بلوز کوچک نیز وجود دارد که می توانید آن را بردارید تا مدار تغذیه قطع شود موتور؛ اگر می خواهید یک سوئیچ روشن/خاموش برای موتور بدون تاثیر بر میکروکنترلر داشته باشید ، می توانید یک سوئیچ را به آن متصل کنید. از این LED ها برای تجسم نیمی از سیم پیچ استفاده می شود. بنابراین اگر به نیمه آبی سیم پیچ انرژی دهید ، چراغ A روشن می شود. نور صورتی روی B را فعال کرد. رنگ زرد C را روشن می کند و نارنجی D را روشن می کند ، بنابراین به شما این امکان را می دهد که بفهمید کدام سیم پیچ ها در حال حاضر روی موتور فعال می شوند. توجه: 3 اتصال ULN2003 برای سر خراب نشده است ، اما ما می توانیم مهندسی انجام دهیم و از این خروجی ها نیز استفاده کنیم \ o/این سه مورد باقی مانده از 7 کانال دارلینگتون از ULN2003 است :)
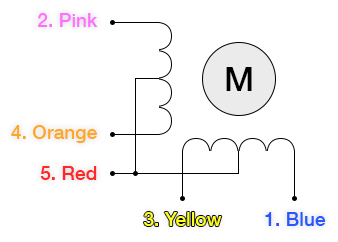 کویل های Stepper Motor 28BYJ-48
کویل های Stepper Motor 28BYJ-48 چگونه می توان این استپر موتور را اجرا کرد ؟
3 مورد وجود دارد: Wave Drive ، Full Step & Half Step
 از تخته ULN2003 مانند این طرح استفاده کنید :)
از تخته ULN2003 مانند این طرح استفاده کنید :) این کد زیر برای Wave Drive است: ما در هر زمان فقط یک فاز را آتش می زنیم ؛
وقتی این کد را اجرا می کنید ، می بینید که هر بار یک LED روشن می شود. می توانید زمان انتظار را به 5 میلی ثانیه منتقل کنید و سریعتر حرکت موتور را مشاهده کنید. اگر مایل هستید ویدئو را تماشا کنید ؛)
Wave Drive احتمالاً ساده ترین روش است اما احتمالاً کمترین استفاده را دارد زیرا دو روش دیگر مزایایی دارند اما با رانندگی موج دوباره ما فقط یک شلیک می کنیم تک فاز در یک زمان ؛ گشتاور را دو برابر می کنیم زیرا با یک قدم کامل ما در واقع دو مرحله را همزمان فعال می کنیم ، بنابراین در هر برش زمانی مشخص. در اینجا کد است:
سومانتخابی که دارید Half-step است. با نصف قدم در واقع قصد داریم ترکیبی از موج سواری و پله کامل را ایجاد کنیم. آیا این گشتاور کمی کمتر از گام کامل به ما می دهد زیرا نیمی از زمان دو فاز انرژی می گیرد اما نیمی از زمان فقط یک فاز انرژی می گیرد بنابراین گشتاور آن به اندازه گام کامل نخواهد بود. اگرچه نصف قدم این است که ما نیمی از زاویه گام را بدست می آوریم ، بنابراین اگر شما با نصف قدم دقت کنید ، دو برابر دقت می کنیم. این کد است:
بگذارید فعلاً اینجا بمانیم. ما سرگرم کننده هستیم و به تدریج نظریه ها را یاد می گیریم ، اینطور نیست ؟! اگر در عمل واقعاً آن را دوست دارید ، ویدیو را تماشا کنید ، لطفاً
پس سلام ، دوست من :)
می توانید تمام کد من را از GitHub repo من بگیرید:)
بارگیری همه فایلهای این پروژه
اعتبارات و منابع
Meet DoRobot-Assembly Techniques J3 Caterpillar-Crawler-Chassis v 1.0-ArduSerie#46
برگه داده Stepper Motor 28BYJ-48–5V
ULN2003،04APG/AFWG 1 2010–12–03 TOSHIBA دو قطبی دیجیتال مدار مجتمع داده
Sparkfun-Motors and Drivers
< p> انواع موتورهای گام به گام توسط داگلاس د. جونز از دانشگاه علوم کامپیوتر IOWAپستهای مرتبط:
Meet DoRobot-Assembly Techniques J3 Caterpillar-Crawler-Chassis v 1.0- ArduSerie#46
L9100S-راننده اسباب بازی آسان برای استفاده-اسباب بازی کم ولتاژ-h-bridge-آسان برای استفاده-موتور-.8A@12v قله-Ardu_Serie#47
< p> EASYDRIVER: 4-Wire-Stepper Motor Driver-Brian Schmalz Design on A3967 IC-Bi-Polar Motors-.75A@30v peak-ساختن اینها نسیم! Ardu_Serie #48DRV8825-Carrier High Stepper Motor Driver Carrier-Stepper Motor-حالت دوقطبی-2.5A@45v peak-Ardu_Serie #59
L298N-Dual Full-Bridge Driver-Darlington آرایه های ترانزیستور بر اساس-3A@50v peak-Ardu-Serie#52
TB6612FNG: Dual DC Motor Driver-SparkFun Motor Driver-3.2A@13.5v peak-Ardu-Serie#49
A4988-Stepper Motor Driver Carrier-Allegro's A4988-دوقطبی Stepper Motor Driver-2A@35v peak-Ardu-Serie#53
Adafruit Motor Shield v1 & v2–4 DC Motors یا 2 Stepper Motor یا 2 Servos -1.2A@25v & 3.2A@15v peak-Ardu-Serie#54
IFR 520 MOS-Module + DoRobot-Switch Heavy DC Loads-10A@100v peak-Ardu-Serie#60
ULN2003 & 28BYJ-48 Stepper Motor-7-ch Darlington Sink Driver-.6A@50v peak-Ardu-Serie#61
L9110 H-bridge module-DC Stepper Motor board Board-. 8A@12 v peak- Ardu_Serie#62
BTS7960B- PN Half Bridge با جریان بالا- برنامه های کاربردی درایو موتور با جریان بالا- NovalithIC TM- 43A@24v peak- ArduSerie#64
VNH2SP30-Monster Moto Shield-از این برد در برنامه های با تقاضای شدید استفاده کنید-رانندگان موتور کامل پل-30A@16v peak-30 Ardu_Serie#63
تأمل در سمپوزیوم شهر فردا فورد
تأمل در سمپوزیوم شهر فردا فورد
نوشته جیم هکت ، رئیس Ford Smart Mobility LLC
این هفته ، شرکت فورد موتور از نمایشگاه بین المللی اتومبیل آمریکای شمالی در دیترویت به عنوان سایتی برای گفتگوی کاملاً متفاوت در مورد آینده و تحرک. شهر فردا بحث ها طیف گسترده ای از افکار را در مورد چالش هایی که با آن روبرو هستیم ارائه می دهد ، فرصتی که پیش روی ما قرار دارد.
گفتگوی این هفته من را متاثر کرد و امیدوارم صدها نفر که در جلسات شرکت کردند درک کنند که دلایلی برای خوش بین بودن در مورد فرصت اختراع وجود دارد. این آینده.
کنترل Stepper Motors با استفاده از Python با Raspberry Pi
کنترل Stepper Motors با استفاده از Python با Raspberry Pi
در این آموزش ، نحوه راه اندازی موتور پله ای با Raspberry Pi را به شما نشان خواهم داد. من از رزبری پای 3 40 پین (مشابه 28 پین) و کیت Kumantech Motor Stepper استفاده می کنم.

وقتی کار خود را با استپر موتور آغاز کردم ، این ویدئوی زیر را به خوبی توضیح دادم. هیچ قسمت مکتوب وجود ندارد یا حداقل در حال حاضر ، پیوند توضیحات دیگر کار نمی کند. من به سادگی نمونه کد و تصاویر بیشتری از تنظیمات خود را ارائه می دهم.
اتصال
اولین مرحله اتصال به Pi شما است. توصیه می کنم Pi خود را به مانیتور وصل کنید ، فقط برای اینکه مطمئن شوید همه چیز به درستی تنظیم شده است. شما باید به اینترنت متصل باشید. همچنین باید دستور زیر را اجرا کنید تا آدرس IP را به SSH وارد کنید:
hostname -I
با آن آدرس IP ، در رایانه شخصی خود (من از OSx استفاده می کنم ) ، ssh pi___ YOUR_PI_IP_ADD___ را در برنامه ترمینال اجرا کنید. این به من امکان می دهد از طریق رایانه شخصی خود روی Pi خود برنامه نویسی کنم. رمز عبور احتمالاً تمشک است.
نرم افزار
این نرم افزار در فیلم زیر توضیح داده شده است. شما باید یک فایل در خط فرمان ایجاد کنید تا من اجرا کنم:
cd Desktop nano test_stepper.py
کد زیر را کپی و جایگذاری کنید ، سپس ذخیره و خارج شوید.
وارد کردن RPi.GPIO به عنوان GPIO زمان وارد کردن
GPIO.setmode (GPIO.BOARD)
control_pins = [7،11،13،15]
برای پین در control_pins: GPIO.setup (پین ، GPIO.OUT) GPIO.output (پین ، 0)
halfstep_seq = [ [1،0،0،0] ، [1،1،0،0] ، [0،1،0،0] ، [0،1،1،0] ، [0،0،1،0] ، [0،0،1،1] ، [0،0،0،1] ، [1،0،0،1] ]
برای i در محدوده (512):
برای نصف قدم در محدوده (8):
برای پین در محدوده (4):
GPIO.output (Control_pins [pin] ، halfstep_seq [halfstep] [pin])
time.sleep (0.001) GPIO.cleanup ()
این کد هنوز کار نمی کند زیرا ما هنوز باید Pi خود را با موتور پله ای وصل کنیم.
< h4> سخت افزارجنبه بسیار مفیدی از ویدئو این بود که مهم نیست از 40 پین Pi یا 28 پین استفاده می کنید ، GPIO یکسان است. من نمودار زیر را از هر دو قرار داده ام و ما از GPIO 04 (پین 7) ، GPIO 17 (پین 11) ، GPIO 27 (پین 13) و GPIO 22 (پین 15) استفاده می کنیم.

 تصویر از: https://www.raspberrypi-spy.co.uk/2012/06/simple-guide-to-the-rpi-gpio-header-and -pins/و https://www.pinterest.ca/pin/231653974559149470/؟lp=true
تصویر از: https://www.raspberrypi-spy.co.uk/2012/06/simple-guide-to-the-rpi-gpio-header-and -pins/و https://www.pinterest.ca/pin/231653974559149470/؟lp=trueتصاویر زیر از تنظیمات سخت افزاری من است و نقشه های سیم به شرح زیر است:
< uli> In1 تا پین 7 (سیم آبی)



اگر ویدیوی بالا را دنبال می کنید ، نقشه کشی سیم کشی به شرح زیر است:
در حال اجرا
اکنون که کد را در Pi و راه اندازی سخت افزار ، اجرا کنید:
python test_stepper.py
و شما باید چیزی شبیه به آن را مشاهده کنید. .com/max/426/1*m4wEZlRvoZhtTPH4JmzAYA.gif ">
منابع: